关键词:
SSD论文阅读(Wei Liu——【ECCV2016】SSD Single Shot MultiBox Detector)
目录
- 作者及相关链接
- 文章的选择原因
- 方法概括
- 方法细节
- 相关背景补充
- 实验结果
- 与相关文章的对比
- 总结
作者

- intro: ECCV 2016 Oral
- arxiv: http://arxiv.org/abs/1512.02325
- paper: http://www.cs.unc.edu/~wliu/papers/ssd.pdf
- slides: http://www.cs.unc.edu/%7Ewliu/papers/ssd_eccv2016_slide.pdf
- github: https://github.com/weiliu89/caffe/tree/ssd
- video: http://weibo.com/p/2304447a2326da963254c963c97fb05dd3a973
- github(MXNet): https://github.com/zhreshold/mxnet-ssd
- github: https://github.com/zhreshold/mxnet-ssd.cpp
- github(Keras): https://github.com/rykov8/ssd_keras
文章的选择原因
- 性能好,single stage

方法概括
-
文章的方法介绍
- SSD主要用来解决目标检测的问题(定位+分类),即输入一张待测图像,输出多个box的位置信息和类别信息
- 测试时,输入一张图像到SSD中,网络输出一个下图最右边的tensor(多维矩阵),对该矩阵进行非极大值抑制(NMS)就能得到每个目标的位置和label信息

Figure2的最右图的1th-20th Channel表示类别,每一个Channel上的map对应原图,last 4 channel的每一个map分别对应x,y,w,h的偏移量。最后4个通道可以确定一个box的位置信息,前20个通道确定类别信息。
-
方法的pipeline和关键点

方法细节
-
模型结构

-
多尺度特征图


-
用来预测的卷积滤波器

-
defaul box



-
groundTruth的标定,损失函数

-
default box和尺度的选择

-
SSD的训练——Hard negative mining

-
SSD的训练——数据扩增

相关背景补充
-
Atrous算法(hole算法)


-
FPS/SPF, Jaccard overlap

-
二类分类/检测常用的评价标准 (recall, precision, f-measure, accuracy, error, PR曲线和ROC曲线,AP,AUC)


-
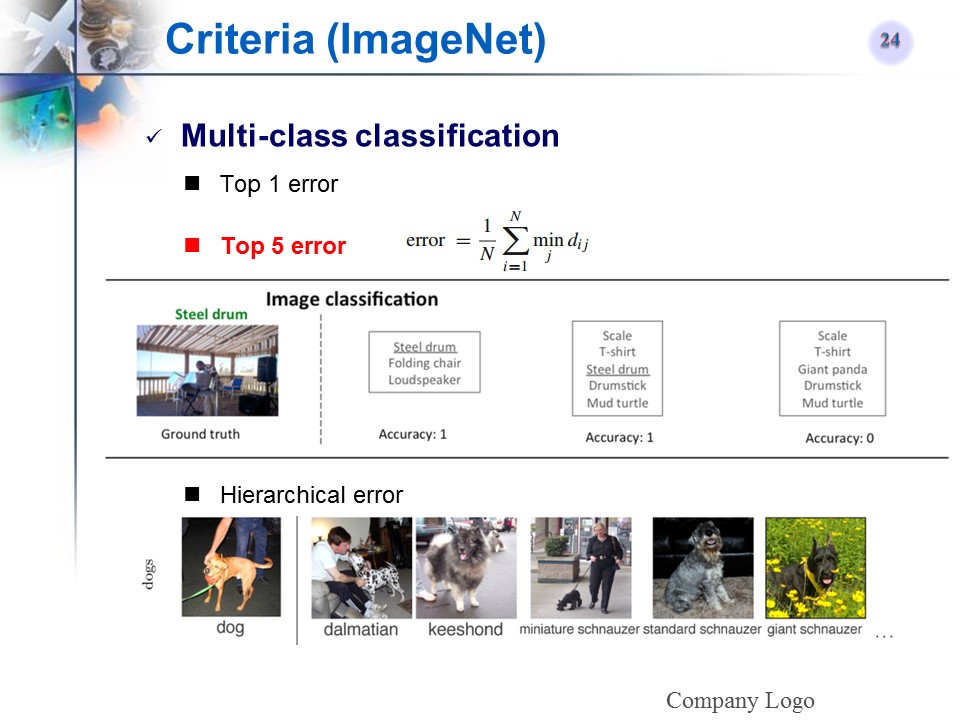
ImageNet多类分类的评价标准
-
ImageNet单目标检测的评价标准

-
ImageNet(多)目标检测的评价标准

实验结果
-
PASCAL VOC2007 test detection结果

-
使用数据扩增、多尺度default box、atrous算法的对比效果

-
SSD512在某类Ianimals)上的检测性能可视化




-
SSD对于目标大小的敏感性实验


-
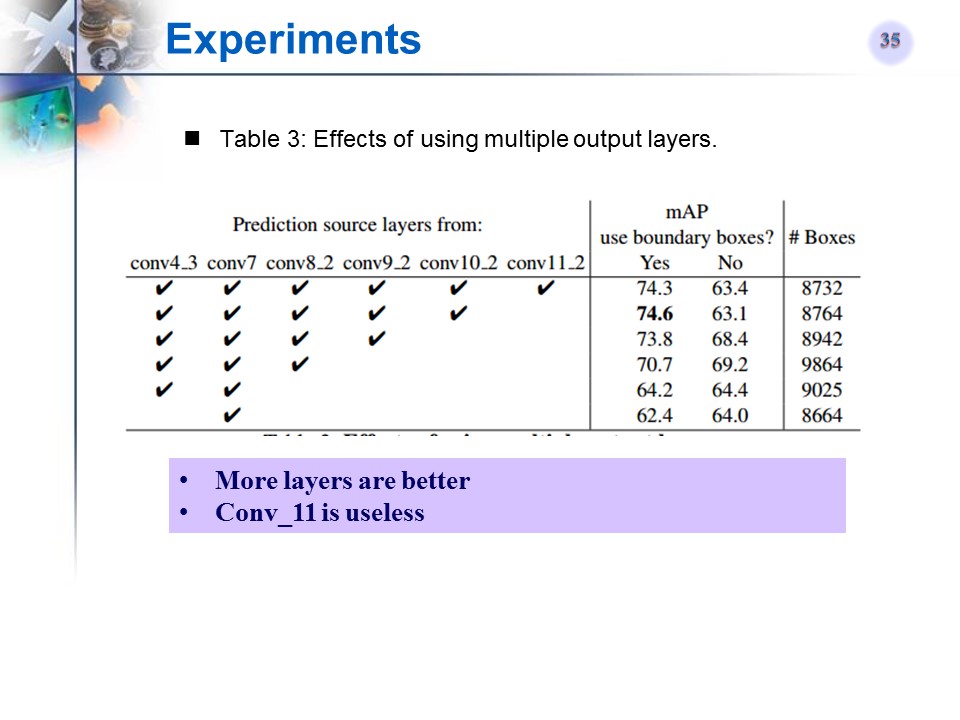
SSD使用的feature map的个数对结果的影响
-
示例结果

-
时间和速度
与相关文章的对比
-
原始R-CNN方法的变形

-
Faster R-CNN和SSD对比

-
YOLO和SSD对比

总结
-
文章贡献
- SSD, a single-shot detector for multiple categories (faster than YOLO, accurate as Faster R-CNN)
- The core of SSD is predicting category scores and box offsets for a fixed set of default bounding boxes using small convolutional filters applied to multiple feature maps from different layers
- Experimental evidence: high accuracy, high speed, simple end-to-end training (single shot)
-
SSD对于其他方法的改进的关键点
-
- Using a small convolutional filter to predict object categories and offsets in bounding box locations
- Using separate predictors (filters) for different aspect ratio detections
- Using multiple layers for prediction at different scales (apply these filters to multiple feature maps to perform detection at multiple stages)
目标检测:yolo和ssd简介
参考技术A作为计算机视觉三大任务(图像分类、目标检测、图像分割)之一,目标检测任务在于从图像中定位并分类感兴趣的物体。传统视觉方案涉及霍夫变换、滑窗、特征提取、边界检测、模板匹配、哈尔特征、DPM、BoW、传... 查看详情
目标检测ssd等onestage算法中关于小目标识别问题的解决方法
...算法包括yolossd等这一系列onestage的方法都不能解决检测时目标较小的问题,经过思考认为问题出在小目标的特征图和大目标不同上。有篇论文解决了这个问题,就是RSSD算法R是彩虹的意思表示将多个特征图相融合来作为分类标准... 查看详情
详细解读目标检测经典算法-ssd(代码片段)
学习目标:知道SSD的多尺度特征图的网络知道SSD中先验框的生成方式知道SSD的损失函数的设计目标检测算法主要分为两类:Two-stage方法:如R-CNN系列算法,主要思路就是通过SelectiveSearch或者CNN网络产生一系列的稀... 查看详情
解读ssd目标检测方法
.../github.com/balancap/SSD-TensorflowSSD是YOLO之后又一个引人注目的目标检测结构,它沿用了YOLO中直接回归bbox和分类概率的方法,同时又参考了FasterR-CNN,大量使用anchor来提升识别准确度。通过把这两种结构相结合,SSD保持了很高的识别... 查看详情
目标检测网络ssd详解(代码片段)
SSD目标检测网络 使用SSD检测网络一段时间了,研究过代码,也踩过坑,算是有能力来总结下SSD目标检测网络了。1.SSD300_Vgg16 最基础的SSD网络是以Vgg16作为backbone,输入图片尺寸为300x300,这里以其为示例,详细剖析下SSD检测... 查看详情
深度学习之目标检测常用算法原理+实践精讲
...家从整体上了解本门课程的整体脉络。1-1课程导学第2章目标检测算法基础介绍本章节主要介绍目标检测算法的基本概念、传统的目标检测算法、目前深度学习目标检测主流方法(one-stage、two-stage、多任务网络)、相关算法的基... 查看详情
目标检测综述
...号处理的作业,在这里分享一下,将介绍计算机视觉中的目标检测任务,论述自深度学习以来目标检测的常见方法,着重讲yolo算法,并且将yolo算法与其他的one-stage以及two-stage方法进行比较。目录1.介绍2.YOLO2.1YOLOv12.2YOLOv22.3YOLOv33.... 查看详情
目标检测算法ssd(singleshotmultiboxdetector)(代码片段)
SSD:SingleShotMultiBoxDetector学习目标1.SSD1.1简介1.2结构1.3流程1.4Detector&classifier1.4.1PriorBox层-defaultboxes1.4.2localization与confidence2.训练与测试流程2.1train流程2.2test流程3.比较4.总结学习目标目标知道SSD的结构说明Detect 查看详情
深度学习目标检测算法ssd论文简介
深度学习目标检测算法SSD论文简介 一、论文简介: ECCV-2016Paper:https://arxiv.org/pdf/1512.02325v5.pdf Slides:http://www.cs.unc.edu/~wliu/papers/ssd_eccv2016_slide.pdf二、代码训练测试: https://github.com/w 查看详情
目标检测算法ssd在window环境下gpu配置训练自己的数据集
由于最近想试一下牛掰的目标检测算法SSD。于是乎,自己做了几千张数据(实际只有几百张,利用数据扩充算法比如镜像,噪声,切割,旋转等扩充到了几千张,其实还是很不够)。于是在网上找了相关的介绍,自己处理数据转... 查看详情
目标检测
传统算法: 1.基于boosting:LBP/HOG/... 2.基于SVM:HOG/SIFT+SVM,DPM基于深度学习的方法: 1.基于region:fasterrcnn 2.基于回归:YOLO/SSD 3.Maskrcnn 查看详情
目标检测ssd相对于yolo与faster-rcnn做了哪些改进?效果如何
参考技术A 但是由于运行selective—search实在是太慢,希望用更快的方法。 逗直接上YOLO呗可以参考博文:物体检测-从RCNN到YOLO参考列表中地YouOnlyLo好Once逗一项,包括YOLO的论文、视频、源码、使用方式。 查看详情
ssd+caffe︱singleshotmultiboxdetector目标检测
作者的思路就是FasterR-CNN+YOLO,利用YOLO的思路和FasterR-CNN的anchorbox的思想。.0导读(本节来源于BOT大赛嘉宾问答环节)SSD这里的设计就是导致你可以一下子可以检测8张图,FasterRCNN一下子只能检测1张图片,这样的话会导致会有8张... 查看详情
对于ssd对小目标检测效果的思考
对于ssd模型对于小目标检测效果不好的问题,我认为可以结合.prototxt文件进行分析,以conv4_3_norm_mbox_priorbox为例:prior_box_parammin_size:30.0max_size:60.0aspect_ratio:2flip:trueclip:falsevariance:0.1variance:0.1varian 查看详情
第19篇se-ssd论文翻译
摘要本文提出了一种基于自集成单级目标检测器(SE-SSD)的室外点云三维目标检测方法。我们的重点是利用我们的公式约束开发软目标和硬目标来联合优化模型,而不引入额外的计算在推理中。具体来说,SE-SSD包含一对tea... 查看详情
目标检测ssd基本思想和网络结构以及论文补充(代码片段)
...入1.SSD的创新点2.SSD的缺点及优化1.主要缺点:SSD对小目标的检测效果一般,作者认为小目标在高层没有足够的信息。2.关于anchor的设置的优化3.如何从分类网络到预测网络?4.如何提取多个目标的特征?1.使用卷积... 查看详情
目标检测—one-stage检测
one-stage检测算法,其不需要regionproposal阶段,直接产生物体的类别概率和位置坐标值,经过单次检测即可直接得到最终的检测结果,因此有着更快的检测速度,比较典型的算法如YOLO,SSD,Retina-Net。4、SSD(2016) SSD结... 查看详情
pytorch-ssd目标检测可视化检测结果(代码片段)
制作类似pascalvoc格式的目标检测数据集:https://www.cnblogs.com/xiximayou/p/12546061.html训练自己创建的数据集:https://www.cnblogs.com/xiximayou/p/12546556.html验证自己创建的数据集:https://www.cnblogs.com/xiximayou/p/12550471.html测试自己创建的数据集:... 查看详情