关键词:
软件定时器是 uC/OS 操作系统的一个内核对象,软件定时器是基于时钟节拍和系统管理创建的软件性定时器,理论上可以创建无限多个,但精准度肯定比硬件定时稍逊一筹。使用硬件定时器往往需要查阅芯片的相关数据手册,比较繁琐,而使用 uC/OS 的软件定时非常方便。
软件定时器启动之后是由软件定时器任务 OS_TmrTask() 统一管理,在创建软件定时器之前必须先使能软件定时器和配置软件定时器的相关参数。
软件定时器的使能位于“os_cfg.h”:
/* ------------------------- TIMER MANAGEMENT -------------------------- */ #define OS_CFG_TMR_EN 1u //使能/禁用软件定时器
其有关参数的配置位于“os_cfg_app.h”:
/* ----------------------- TIMERS ----------------------- */ #define OS_CFG_TMR_TASK_PRIO 11u //定时器任务的优先级 #define OS_CFG_TMR_TASK_RATE_HZ 10u //定时器的时基 (一般不能大于 OS_CFG_TICK_RATE_HZ ) #define OS_CFG_TMR_TASK_STK_SIZE 128u //定时器任务的栈空间大小(单位:CPU_STK) #define OS_CFG_TMR_WHEEL_SIZE 17u // OSCfg_TmrWheel 数组的大小,推荐使用任务总数/4,且为质数
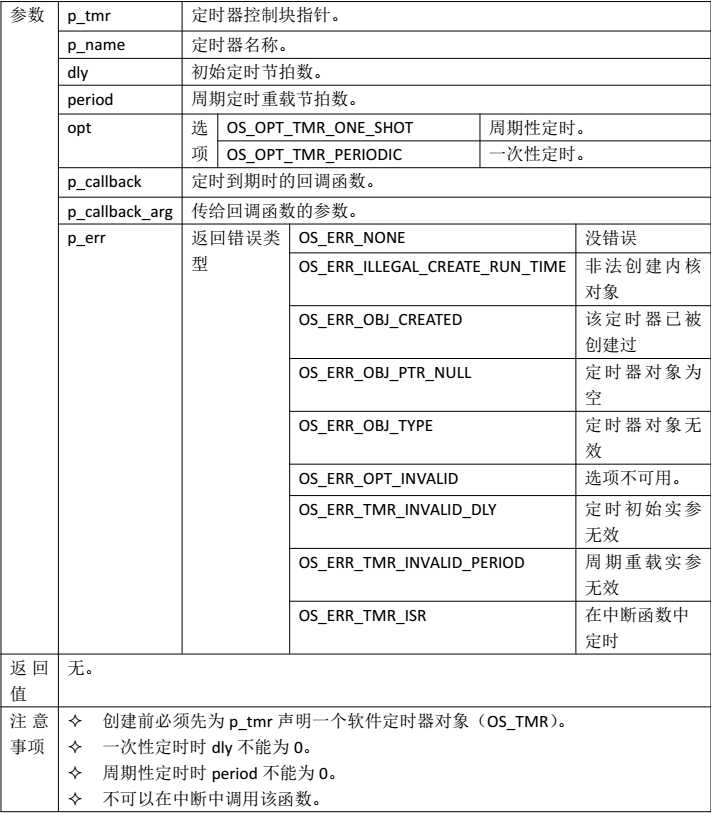
OSTmrCreate ()
要使用 uC/OS 的软件定时器必须先声明和创建软件定时器,调用 OSTmrCreate () 函数可以创建一个软件定时器。OSTmrCreate () 函数的信息如下表所示。

OSTmrCreate () 函数的定义位于“os_tmr.c”:


void OSTmrCreate (OS_TMR *p_tmr, //定时器控制块指针 CPU_CHAR *p_name, //命名定时器,有助于调试 OS_TICK dly, //初始定时节拍数 OS_TICK period, //周期定时重载节拍数 OS_OPT opt, //选项 OS_TMR_CALLBACK_PTR p_callback, //定时到期时的回调函数 void *p_callback_arg, //传给回调函数的参数 OS_ERR *p_err) //返回错误类型 CPU_SR_ALLOC(); //使用到临界段(在关/开中断时)时必需该宏,该宏声明和定义一个局部变 //量,用于保存关中断前的 CPU 状态寄存器 SR(临界段关中断只需保存SR) //,开中断时将该值还原。 #ifdef OS_SAFETY_CRITICAL //如果使能(默认禁用)了安全检测 if (p_err == (OS_ERR *)0) //如果错误类型实参为空 OS_SAFETY_CRITICAL_EXCEPTION(); //执行安全检测异常函数 return; //返回,不执行定时操作 #endif #ifdef OS_SAFETY_CRITICAL_IEC61508 //如果使能(默认禁用)了安全关键 if (OSSafetyCriticalStartFlag == DEF_TRUE) //如果是在调用 OSSafetyCriticalStart() 后创建该定时器 *p_err = OS_ERR_ILLEGAL_CREATE_RUN_TIME; //错误类型为“非法创建内核对象” return; //返回,不执行定时操作 #endif #if OS_CFG_CALLED_FROM_ISR_CHK_EN > 0u //如果使能(默认使能)了中断中非法调用检测 if (OSIntNestingCtr > (OS_NESTING_CTR)0) //如果该函数是在中断中被调用 *p_err = OS_ERR_TMR_ISR; //错误类型为“在中断函数中定时” return; //返回,不执行定时操作 #endif #if OS_CFG_ARG_CHK_EN > 0u //如果使能(默认使能)了参数检测 if (p_tmr == (OS_TMR *)0) //如果参数 p_tmr 为空 *p_err = OS_ERR_OBJ_PTR_NULL; //错误类型为“定时器对象为空” return; //返回,不执行定时操作 switch (opt) //根据延时选项参数 opt 分类操作 case OS_OPT_TMR_PERIODIC: //如果选择周期性定时 if (period == (OS_TICK)0) //如果周期重载实参为0 *p_err = OS_ERR_TMR_INVALID_PERIOD; //错误类型为“周期重载实参无效” return; //返回,不执行定时操作 break; case OS_OPT_TMR_ONE_SHOT: //如果选择一次性定时 if (dly == (OS_TICK)0) //如果定时初始实参为0 *p_err = OS_ERR_TMR_INVALID_DLY; //错误类型为“定时初始实参无效” return; //返回,不执行定时操作 break; default: //如果选项超出预期 *p_err = OS_ERR_OPT_INVALID; //错误类型为“选项非法” return; //返回,不执行定时操作 #endif OS_CRITICAL_ENTER(); //进入临界段 p_tmr->State = (OS_STATE )OS_TMR_STATE_STOPPED; //初始化定时器指标 p_tmr->Type = (OS_OBJ_TYPE )OS_OBJ_TYPE_TMR; p_tmr->NamePtr = (CPU_CHAR *)p_name; p_tmr->Dly = (OS_TICK )dly; p_tmr->Match = (OS_TICK )0; p_tmr->Remain = (OS_TICK )0; p_tmr->Period = (OS_TICK )period; p_tmr->Opt = (OS_OPT )opt; p_tmr->CallbackPtr = (OS_TMR_CALLBACK_PTR)p_callback; p_tmr->CallbackPtrArg = (void *)p_callback_arg; p_tmr->NextPtr = (OS_TMR *)0; p_tmr->PrevPtr = (OS_TMR *)0; #if OS_CFG_DBG_EN > 0u //如果使能(默认使能)了调试代码和变量 OS_TmrDbgListAdd(p_tmr); //将该定时添加到定时器双向调试链表 #endif OSTmrQty++; //定时器个数加1 OS_CRITICAL_EXIT_NO_SCHED(); //退出临界段(无调度) *p_err = OS_ERR_NONE; //错误类型为“无错误”
OSTmrStart ()
创建完软件定时器后,如果要使用该软件定时器,需要调用 OSTmrStart () 函数启动该软件定时器。OSTmrStart () 函数的信息如下表所示。 
OSTmrCreate () 函数的定义也位于“os_tmr.c”。:
CPU_BOOLEAN OSTmrStart (OS_TMR *p_tmr, //定时器控制块指针 OS_ERR *p_err) //返回错误类型 OS_ERR err; CPU_BOOLEAN success; //暂存函数执行结果 #ifdef OS_SAFETY_CRITICAL //如果使能(默认禁用)了安全检测 if (p_err == (OS_ERR *)0) //如果错误类型实参为空 OS_SAFETY_CRITICAL_EXCEPTION(); //执行安全检测异常函数 return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif #if OS_CFG_CALLED_FROM_ISR_CHK_EN > 0u //如果使能(默认使能)了中断中非法调用检测 if (OSIntNestingCtr > (OS_NESTING_CTR)0) //如果该函数是在中断中被调用 *p_err = OS_ERR_TMR_ISR; //错误类型为“在中断函数中定时” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif #if OS_CFG_ARG_CHK_EN > 0u //如果使能(默认使能)了参数检测 if (p_tmr == (OS_TMR *)0) //如果使能 p_tmr 的实参为空 *p_err = OS_ERR_TMR_INVALID; //错误类型为“无效的定时器” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif #if OS_CFG_OBJ_TYPE_CHK_EN > 0u //如果使能(默认使能)了对象类型检测 if (p_tmr->Type != OS_OBJ_TYPE_TMR) //如果该定时器的对象类型有误 *p_err = OS_ERR_OBJ_TYPE; //错误类型为“对象类型错误” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif OSSchedLock(&err); //锁住调度器 switch (p_tmr->State) //根据定时器的状态分类处理 case OS_TMR_STATE_RUNNING: //如果定时器正在运行,则重启 OS_TmrUnlink(p_tmr); //从定时器轮里移除该定时器 OS_TmrLink(p_tmr, OS_OPT_LINK_DLY); //将该定时器重新插入到定时器轮 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_NONE; //错误类型为“无错误” success = DEF_TRUE; //执行结果暂为 DEF_TRUE break; case OS_TMR_STATE_STOPPED: //如果定时器已被停止,则开启 case OS_TMR_STATE_COMPLETED: //如果定时器已完成了,则开启 OS_TmrLink(p_tmr, OS_OPT_LINK_DLY); //将该定时器重新插入到定时器轮 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_NONE; //错误类型为“无错误” success = DEF_TRUE; //执行结果暂为 DEF_TRUE break; case OS_TMR_STATE_UNUSED: //如果定时器未被创建 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_TMR_INACTIVE; //错误类型为“定时器未激活” success = DEF_FALSE; //执行结果暂为 DEF_FALSE break; default: //如果定时器的状态超出预期 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_TMR_INVALID_STATE; //错误类型为“定时器无效” success = DEF_FALSE; //执行结果暂为 DEF_FALSE break; return (success); //返回执行结果
这里涉及到两个函数,OS_TmrLink() 和 OS_TmrUnlink()。所有的软件定时器是通过定时器轮来实现管理的,定时器轮与时钟节拍列表数组一样,就是有若干个定时器列表组成的数组。OS_TmrLink() 函数是将软件定时器插入到定时器轮的列表,相反 OS_TmrUnlink() 函数是将软件定时器从定时器轮的列表移除。该操作与时钟节拍插入和移除节拍列表类似。
OS_TmrLink() 函数的定义位于“os_tmr.c” :
void OS_TmrLink (OS_TMR *p_tmr, //定时器控制块指针 OS_OPT opt) //选项 OS_TMR_SPOKE *p_spoke; OS_TMR *p_tmr0; OS_TMR *p_tmr1; OS_TMR_SPOKE_IX spoke; p_tmr->State = OS_TMR_STATE_RUNNING; //重置定时器为运行状态 if (opt == OS_OPT_LINK_PERIODIC) //如果定时器是再次插入 p_tmr->Match = p_tmr->Period + OSTmrTickCtr; //匹配时间加个周期重载值 else //如果定时器是首次插入 if (p_tmr->Dly == (OS_TICK)0) //如果定时器的 Dly = 0 p_tmr->Match = p_tmr->Period + OSTmrTickCtr; //匹配时间加个周期重载值 else //如果定时器的 Dly != 0 p_tmr->Match = p_tmr->Dly + OSTmrTickCtr; //匹配时间加个 Dly spoke = (OS_TMR_SPOKE_IX)(p_tmr->Match % OSCfg_TmrWheelSize); //通过哈希算法觉得将该定时器 p_spoke = &OSCfg_TmrWheel[spoke]; //插入到定时器轮的哪个列表。 if (p_spoke->FirstPtr == (OS_TMR *)0) //如果列表为空, p_tmr->NextPtr = (OS_TMR *)0; //直接将该定时器作为列表的第一个元素。 p_tmr->PrevPtr = (OS_TMR *)0; p_spoke->FirstPtr = p_tmr; p_spoke->NbrEntries = 1u; else //如果列表非空 p_tmr->Remain = p_tmr->Match //算出定时器 p_tmr 的剩余时间 - OSTmrTickCtr; p_tmr1 = p_spoke->FirstPtr; //取列表的首个元素到 p_tmr1 while (p_tmr1 != (OS_TMR *)0) //如果 p_tmr1 非空 p_tmr1->Remain = p_tmr1->Match //算出 p_tmr1 的剩余时间 - OSTmrTickCtr; if (p_tmr->Remain > p_tmr1->Remain) //如果 p_tmr 的剩余时间大于 p_tmr1 的 if (p_tmr1->NextPtr != (OS_TMR *)0) //如果 p_tmr1 后面非空 p_tmr1 = p_tmr1->NextPtr; //取p_tmr1后一个定时器为新的p_tmr1进行下一次循环 else //如果 p_tmr1 后面为空 p_tmr->NextPtr = (OS_TMR *)0; //将 p_tmr 插到 p_tmr1 的后面,结束循环 p_tmr->PrevPtr = p_tmr1; p_tmr1->NextPtr = p_tmr; p_tmr1 = (OS_TMR *)0; else //如果 p_tmr 的剩余时间不大于 p_tmr1 的, if (p_tmr1->PrevPtr == (OS_TMR *)0) //将 p_tmr 插入到 p_tmr1 的前一个,结束循环。 p_tmr->PrevPtr = (OS_TMR *)0; p_tmr->NextPtr = p_tmr1; p_tmr1->PrevPtr = p_tmr; p_spoke->FirstPtr = p_tmr; else p_tmr0 = p_tmr1->PrevPtr; p_tmr->PrevPtr = p_tmr0; p_tmr->NextPtr = p_tmr1; p_tmr0->NextPtr = p_tmr; p_tmr1->PrevPtr = p_tmr; p_tmr1 = (OS_TMR *)0; p_spoke->NbrEntries++; //列表元素成员数加1 if (p_spoke->NbrEntriesMax < p_spoke->NbrEntries) //更新列表成员数最大值历史记录 p_spoke->NbrEntriesMax = p_spoke->NbrEntries;
OSTmrStop ()
OSTmrStop () 函数用于停止一个软件定时器。软件定时器被停掉之后可以调用OSTmrStart () 函数重启,但是重启之后定时器是从头计时,而不是接着上次停止的时刻继续计时。OSTmrStop () 函数的信息如下表所示。


OSTmrStop () 函数的定义也位于“os_tmr.c”。
CPU_BOOLEAN OSTmrStop (OS_TMR *p_tmr, //定时器控制块指针 OS_OPT opt, //选项 void *p_callback_arg, //传给回调函数的新参数 OS_ERR *p_err) //返回错误类型 OS_TMR_CALLBACK_PTR p_fnct; OS_ERR err; CPU_BOOLEAN success; //暂存函数执行结果 #ifdef OS_SAFETY_CRITICAL //如果使能(默认禁用)了安全检测 if (p_err == (OS_ERR *)0) //如果错误类型实参为空 OS_SAFETY_CRITICAL_EXCEPTION(); //执行安全检测异常函数 return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif #if OS_CFG_CALLED_FROM_ISR_CHK_EN > 0u //如果使能(默认使能)了中断中非法调用检测 if (OSIntNestingCtr > (OS_NESTING_CTR)0) //如果该函数是在中断中被调用 *p_err = OS_ERR_TMR_ISR; //错误类型为“在中断函数中定时” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif #if OS_CFG_ARG_CHK_EN > 0u //如果使能(默认使能)了参数检测 if (p_tmr == (OS_TMR *)0) //如果使能 p_tmr 的实参为空 *p_err = OS_ERR_TMR_INVALID; //错误类型为“无效的定时器” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif #if OS_CFG_OBJ_TYPE_CHK_EN > 0u //如果使能(默认使能)了对象类型检测 if (p_tmr->Type != OS_OBJ_TYPE_TMR) //如果该定时器的对象类型有误 *p_err = OS_ERR_OBJ_TYPE; //错误类型为“对象类型错误” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif OSSchedLock(&err); //锁住调度器 switch (p_tmr->State) //根据定时器的状态分类处理 case OS_TMR_STATE_RUNNING: //如果定时器正在运行 OS_TmrUnlink(p_tmr); //从定时器轮列表里移除该定时器 *p_err = OS_ERR_NONE; //错误类型为“无错误” switch (opt) //根据选项分类处理 case OS_OPT_TMR_CALLBACK: //执行回调函数,使用创建定时器时的实参 p_fnct = p_tmr->CallbackPtr; //取定时器的回调函数 if (p_fnct != (OS_TMR_CALLBACK_PTR)0) //如果回调函数存在 (*p_fnct)((void *)p_tmr, p_tmr->CallbackPtrArg); //使用创建定时器时的实参执行回调函数 else //如果回调函数不存在 *p_err = OS_ERR_TMR_NO_CALLBACK; //错误类型为“定时器没有回调函数” break; case OS_OPT_TMR_CALLBACK_ARG: //执行回调函数,使用 p_callback_arg 作为实参 p_fnct = p_tmr->CallbackPtr; //取定时器的回调函数 if (p_fnct != (OS_TMR_CALLBACK_PTR)0) //如果回调函数存在 (*p_fnct)((void *)p_tmr, p_callback_arg); //使用 p_callback_arg 作为实参执行回调函数 else //如果回调函数不存在 *p_err = OS_ERR_TMR_NO_CALLBACK; //错误类型为“定时器没有回调函数” break; case OS_OPT_TMR_NONE: //只需停掉定时器 break; default: //情况超出预期 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_OPT_INVALID; //错误类型为“选项无效” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 OSSchedUnlock(&err); success = DEF_TRUE; break; case OS_TMR_STATE_COMPLETED: //如果定时器已完成第一次定时 case OS_TMR_STATE_STOPPED: //如果定时器已被停止 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_TMR_STOPPED; //错误类型为“定时器已被停止” success = DEF_TRUE; //执行结果暂为 DEF_TRUE break; case OS_TMR_STATE_UNUSED: //如果该定时器未被创建过 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_TMR_INACTIVE; //错误类型为“定时器未激活” success = DEF_FALSE; //执行结果暂为 DEF_FALSE break; default: //如果定时器状态超出预期 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_TMR_INVALID_STATE;//错误类型为“定时器状态非法” success = DEF_FALSE; //执行结果暂为 DEF_FALSE break; return (success); //返回执行结果
OSTmrDel ()
OSTmrDel () 函数用于删除一个软件定时器。OSTmrDel () 函数的信息如下表所示。


OSTmrDel () 函数的定义位于“os_tmr.c”:
#if OS_CFG_TMR_DEL_EN > 0u //如果使能(默认是嫩)了 OSTmrDel() 函数 CPU_BOOLEAN OSTmrDel (OS_TMR *p_tmr, //定时器控制块指针 OS_ERR *p_err) //返回错误类型 OS_ERR err; CPU_BOOLEAN success; //暂存函数执行结果 #ifdef OS_SAFETY_CRITICAL //如果使能(默认禁用)了安全检测 if (p_err == (OS_ERR *)0) //如果错误类型实参为空 OS_SAFETY_CRITICAL_EXCEPTION(); //执行安全检测异常函数 return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif #if OS_CFG_CALLED_FROM_ISR_CHK_EN > 0u //如果使能(默认使能)了中断中非法调用检测 if (OSIntNestingCtr > (OS_NESTING_CTR)0) //如果该函数是在中断中被调用 *p_err = OS_ERR_TMR_ISR; //错误类型为“在中断函数中定时” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif #if OS_CFG_ARG_CHK_EN > 0u //如果使能(默认使能)了参数检测 if (p_tmr == (OS_TMR *)0) //如果使能 p_tmr 的实参为空 *p_err = OS_ERR_TMR_INVALID; //错误类型为“无效的定时器” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif #if OS_CFG_OBJ_TYPE_CHK_EN > 0u //如果使能(默认使能)了对象类型检测 if (p_tmr->Type != OS_OBJ_TYPE_TMR) //如果该定时器的对象类型有误 *p_err = OS_ERR_OBJ_TYPE; //错误类型为“对象类型错误” return (DEF_FALSE); //返回 DEF_FALSE,不继续执行 #endif OSSchedLock(&err); //锁住调度器 #if OS_CFG_DBG_EN > 0u //如果使能(默认使能)了调试代码和变量 OS_TmrDbgListRemove(p_tmr); //将该定时从定时器双向调试链表移除 #endif OSTmrQty--; //定时器个数减1 switch (p_tmr->State) //根据定时器的状态分类处理 case OS_TMR_STATE_RUNNING: //如果定时器正在运行 OS_TmrUnlink(p_tmr); //从当前定时器轮列表移除定时器 OS_TmrClr(p_tmr); //复位定时器的指标 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_NONE; //错误类型为“无错误” success = DEF_TRUE; //执行结果暂为 DEF_TRUE break; case OS_TMR_STATE_STOPPED: //如果定时器已被停止 case OS_TMR_STATE_COMPLETED: //如果定时器已完成第一次定时 OS_TmrClr(p_tmr); //复位定时器的指标 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_NONE; //错误类型为“无错误” success = DEF_TRUE; //执行结果暂为 DEF_TRUE break; case OS_TMR_STATE_UNUSED: //如果定时器已被删除 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_TMR_INACTIVE; //错误类型为“定时器未激活” success = DEF_FALSE; //执行结果暂为 DEF_FALSE break; default: //如果定时器的状态超出预期 OSSchedUnlock(&err); //解锁调度器 *p_err = OS_ERR_TMR_INVALID_STATE; //错误类型为“定时器无效” success = DEF_FALSE; //执行结果暂为 DEF_FALSE break; return (success); //返回执行结果 #endif
multitimer,一款可无限扩展的软件定时器(代码片段)
...家带来的开源项目是MultiTimer,一款可无限扩展的软件定时器,作者0x1abin,目前收获95个star,遵循MIT开源许可协议。MultiTimer是一个软件定时器扩展模块,可无限扩展你所需的定时器任务&# 查看详情
单片机裸机实用组件--软件定时器时间戳(代码片段)
单片机裸机实用组件–软件定时器、时间戳之前写过一篇关于单片机定时器延时计时功能的博客,刚工作的时候搞得现在看来还是比较糙的,是时候整一个新的了。base_timer单片机裸机适用的定时器小组件,通过一个定时器... 查看详情
freertos入门(08):软件定时器(代码片段)
文章目录目的基础说明使用演示相关函数总结目的软件定时器是一个非常常用且非常好用的功能,这篇文章将对FreeRTOS中相关内容做个介绍。本文代码测试环境见前面的文章:《FreeRTOS入门(01):基础说明与... 查看详情
stm32cubeide+freertos软件定时器实验(代码片段)
软件定时器实验是在FreeRTOS中创建了两个软件定时器,其中一个软件定时器是单次模式,5000个tick调用一次回调函数,另一个软件定时器是周期模式,1000个tick调用一次回调函数,在回调函数中输出相关信息,。创建工程RTOS_Timer... 查看详情
004_软件定时器(代码片段)
软件定时器API函数:红色常用函数名作用OSTmrCreate()创建定时器并制定运行模式OSTmrDel()删除定时器OSTmrRemainGet()获取定时器的剩余时间OSTmrStart()启动定时器计数OSTmrStateGet()获取当前定时器状态OSTmrStop()停止计数器倒计时 (一)&... 查看详情
stm32g0学习手册——freertos软件定时器(代码片段)
1.创建好带有printf-stdarg.c的FreeRTOS的工程2.修改main.c文件/*USERCODEBEGINIncludes*/#include"FreeRTOS.h"#include"task.h"#include"timers.h"#include<stdio.h>#include<string.h>/*US 查看详情
stm32g0学习手册——freertos软件定时器(代码片段)
1.创建好带有printf-stdarg.c的FreeRTOS的工程2.修改main.c文件/*USERCODEBEGINIncludes*/#include"FreeRTOS.h"#include"task.h"#include"timers.h"#include<stdio.h>#include<string.h>/*US 查看详情
定时任务(代码片段)
1.1简介1.定时任务种类crond(crontab)定时任务软件(软件包cronie)atd运行一次anacron非7*24小时运行2.病毒利用定时任务系统定时任务,系统会自动运行里面的内容系统中毒的时候,会把内容放到这里面,以便病毒文件被删除了,会进行... 查看详情
使用systick实现多组软件定时器功能,你知道吗?(代码片段)
摘要:在单片机中,一想到定时器可能就会想到通用定时器(TIM2~TIM5和TIM9~TIM14)或者高级定时器(TIM1和TIM8)。这些定时器的功能很强大,除了基本的功能就是定时,还可以可以测量输入信号的脉冲宽度,可以生产... 查看详情
ucosiii软件定时器(代码片段)
1、UCOSIII软件定时器简介1.1、软件定时器简介:定时器本质是递减计数器,当计数器减到零时可以触发某种动作的执行,这个动作通过回调函数实现。当定时器计时完成时,定义的回调函数就会被立即调用,应... 查看详情
分享一个简单易用的软件定时器模块——基于keil+stm32f103zet+hal库(裸机实现)(代码片段)
...说明,=================================分享一个简单易用的软件定时器模块——MultiTimer。源码地址:https://github.com/0x1abin/MultiTimer简 查看详情
单片机裸机实用组件--软件定时器时间戳(代码片段)
单片机裸机实用组件–软件定时器、时间戳之前写过一篇关于单片机定时器延时计时功能的博客,刚工作的时候搞得现在看来还是比较糙的,是时候整一个新的了。base_timer单片机裸机适用的定时器小组件,通过一个定时器... 查看详情
毫秒级定时任务定时执行定时任务执行软件——定时执行专家(代码片段)
《定时执行专家》软件的一个重要的特点就是能够毫秒级定时执行任务,能够保证误差在50毫秒以内。因为毫秒级的触发要求非常快的时间检测速度,为了能达到这个要求,我们采用了多线程并行处理的方式。多线程... 查看详情
每天学一个,设计模式概要(代码片段)
...软件复用、设计复用的意识。 比如,现在要设计一个定时器,用于计时,当计时时间满足条件时执行某项任务。假设硬件定时器中断1ms,任务定时1s,可以用uint32_t 查看详情
韦东山freertos系列教程之第十章软件定时器(softwaretimer)(代码片段)
文章目录系列教程总目录概述10.1软件定时器的特性10.2软件定时器的上下文10.2.1守护任务10.2.2守护任务的调度10.2.3回调函数10.3软件定时器的函数10.3.1创建10.3.2删除10.3.3启动/停止10.3.4复位10.3.5修改周期10.3.6定时器ID10.4示例24:一般... 查看详情
定时任务(代码片段)
...命令3)自动清理磁盘4)自动的进行时间同步更新ntpdatexxx2.软件种类1)cronie 实现定时任务功能2)atd 实现定时任务功能只能一次设置定时功能 3)anacron 实现定时任务功能应用在家用电脑7*24服务... 查看详情
windows定时开机并开启工作软件(代码片段)
...,将“允许混合睡眠关闭”,将“允许使用唤醒定时器”开启。新建基本任务中,执行写好的脚本在条件页,勾选上“唤醒计算机运行此任务”,否则无法实现计算机定时唤醒。 查看详情
鸿蒙轻内核定时器swtmr:不受硬件和数量限制,满足用户需求(代码片段)
摘要:本文通过分析鸿蒙轻内核定时器模块的源码,掌握定时器使用上的差异。本文分享自华为云社区《鸿蒙轻内核M核源码分析系列十四软件定时器Swtmr》,作者:zhushy。软件定时器(SoftwareTimer)是基于... 查看详情